Industrial intelligent robot solution provider!
Tel: +86-18151716789 | E-mail: hm@sypo.net.cn


-
-
ABOUT US
 LANGUAGE ▼
LANGUAGE ▼
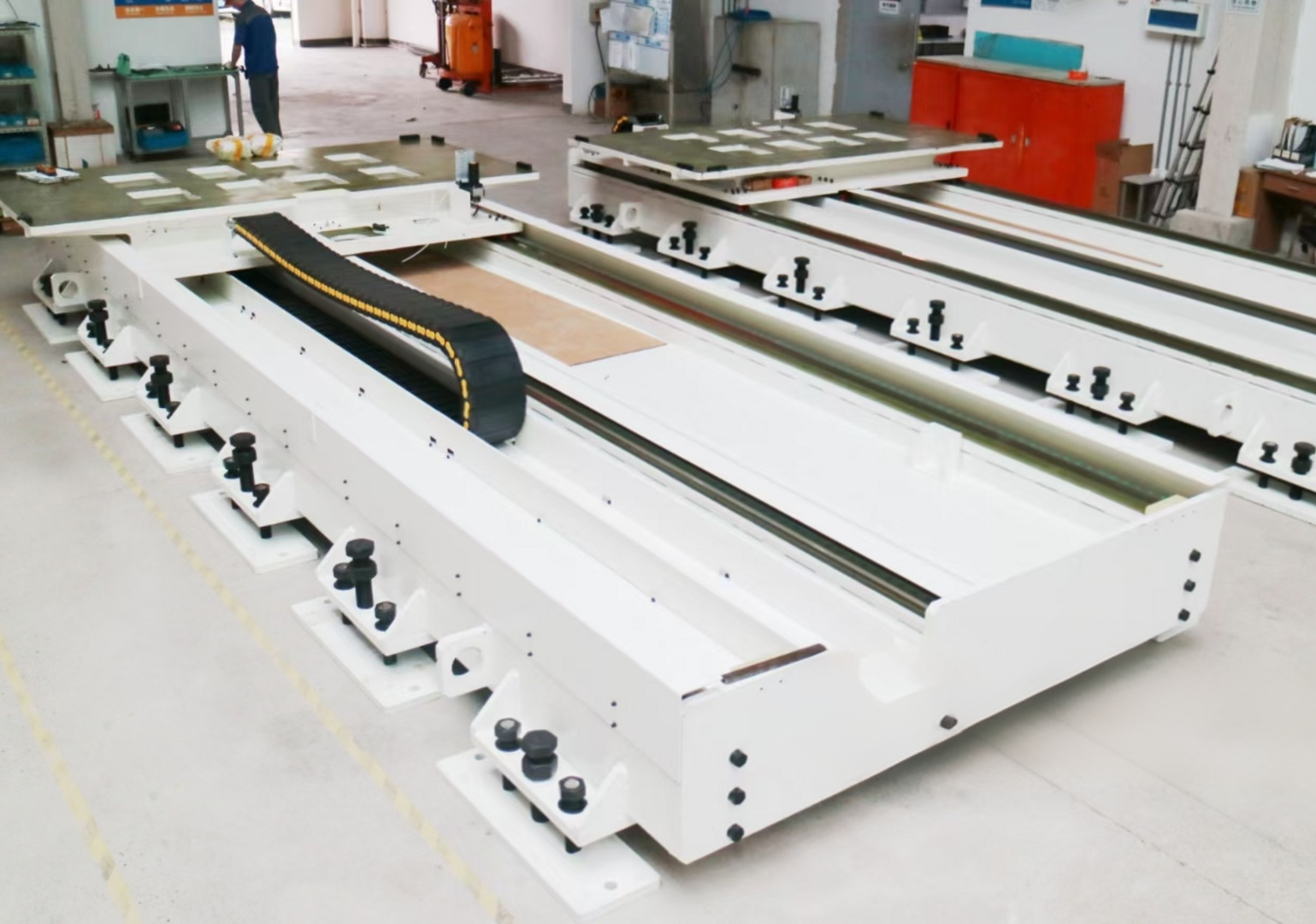
Robot external axis walking track
- Commodity name:Robot external axis walking track
- Manufacturer: Xinbao Intelligent
Product Details
Components of the external axis of the robot:
The external axis of a robot is generally composed of an actuator, a driving device, a detection device, a control system, and complex machinery.
Executing Agency
The robot body generally adopts a spatial open chain linkage mechanism for its arm, where the motion pair (rotating pair or moving pair) is often referred to as a joint, and the number of joints is usually the degree of freedom of the robot. According to the different joint configuration and motion coordinate forms, robot actuators can be divided into types such as Cartesian coordinate, cylindrical coordinate, polar coordinate, and joint coordinate. For the sake of anthropomorphism, the relevant parts of the robot body are often referred to as the base, waist, arms, wrists, hands (gripper or end effector), and walking parts (for mobile robots).
Drive device
It is a mechanism that drives the actuator to move, and uses power components to make the robot move according to the command signals issued by the control system. It inputs electrical signals and outputs linear and angular displacements. The driving devices used by robots are mainly electric driving devices, such as stepper motors, servo motors, etc. In addition, hydraulic, pneumatic and other driving devices are also used.
Detection device
It is a real-time detection of the robot's motion and working conditions, which is fed back to the control system as needed. After comparing with the set information, the actuator is adjusted to ensure that the robot's actions meet the predetermined requirements. Sensors used as detection devices can be roughly divided into two categories: one is internal information sensors, which are used to detect the internal conditions of various parts of the robot, such as the position, velocity, acceleration, etc. of each joint, and send the measured information as feedback signals to the controller to form closed-loop control.
Control system
One is centralized control, which means that all control of the robot is completed by a microcomputer. Another type is decentralized (hierarchical) control, which uses multiple microcomputers to share the control of the robot. For example, when upper and lower level microcomputers are used to jointly complete the control of the robot, the host is often responsible for system management, communication, kinematic and dynamic calculations, and sends command information to lower level microcomputers; As a subordinate slave, each joint corresponds to a CPU for interpolation and servo control processing, achieving the given motion and providing feedback information to the host. According to the different requirements of homework tasks, the control methods of robots can be divided into point control, continuous trajectory control, and force (torque) control.
Development characteristics of robot external axis:
The characteristics of robot development nowadays can be summarized as follows: horizontally, the application scope is becoming wider and wider. Expand from 95% of industrial applications to more non industrial applications in various fields. Such as surgery, fruit picking, pruning, tunnel excavation, reconnaissance, mine clearance, as well as space robots and underwater robots. The application of robots is unlimited, as long as it can be imagined, it can be created and realized; Vertically, there will be more and more types of robots, such as micro robots that enter the human body, which have become a new direction and can be as small as a grain of rice; The intelligence of robots has been strengthened, and robots will become smarter.
Key words:



Online Consultation
Promote welding and cutting automation related technologies.
✓ Reply Within 24 Hours
✓ Site Commissioning
✓ Customer Service Staff Provide Attentive Service
✓ OFFICIAL Website: www.xbznjx.com
Copyright © 2024 Xinbao Robot Technology (Nantong) Co., Ltd. All Rights Reserved | 苏ICP备19061139号

