Industrial intelligent robot solution provider!
Tel: +86-18151716789 | E-mail: hm@sypo.net.cn


-
-
ABOUT US
 LANGUAGE ▼
LANGUAGE ▼
Welding robotic arm
- Commodity name:Welding robotic arm
- Manufacturer: Xinbao Intelligent
Product Details

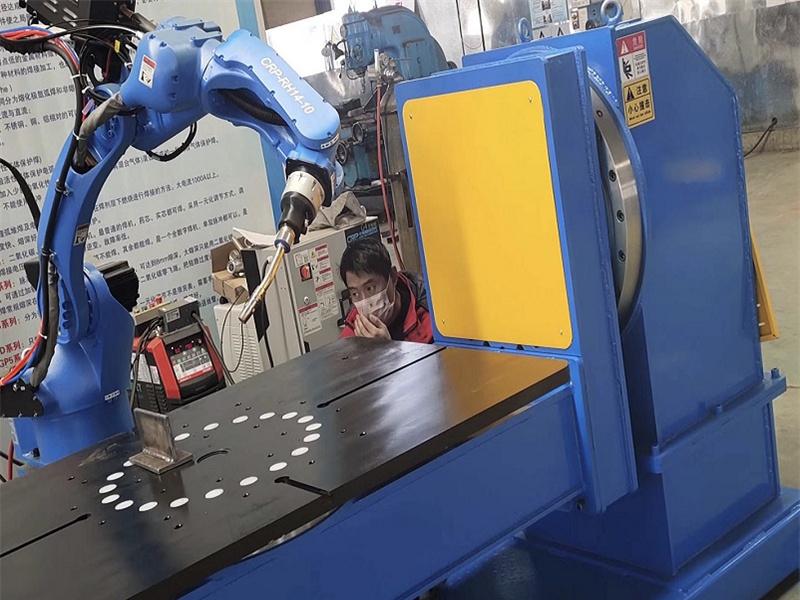
Composition of welding robotic arm:
The welding robotic arm is mainly composed of three parts: the actuator, the drive mechanism, and the control system. The hand is a component used to grip workpieces (or tools), and there are various structural forms depending on the shape, size, weight, material, and operational requirements of the grasped object, such as clamping type, supporting type, and suction type. A motion mechanism that enables the hand to complete various rotations (swings), movements, or compound movements to achieve specified actions, changing the position and posture of the grasped object. The independent motion modes of a moving mechanism, such as lifting, extending, and rotating, are called the degrees of freedom of a robotic arm. In order to capture objects at any position and orientation in space, there need to be 6 degrees of freedom. The degree of freedom is a key parameter in the design of robotic arms. The more degrees of freedom there are, the greater the flexibility and versatility of the robotic arm, and the more complex its structure becomes. Generally, specialized robotic arms have 2-3 degrees of freedom. The control system completes specific actions by controlling the motors of each degree of freedom of the robotic arm. Simultaneously receiving feedback from sensors to form a stable closed-loop control. The core of a control system is usually composed of microcontroller chips such as microcontrollers or DSPs, which are programmed to achieve the desired functions.
Execution mechanism of welding robotic arm:
The actuator of a robotic arm is divided into hand, arm, and torso;
1. Hand
The hand is installed at the front end of the arm. The inner hole of the arm is equipped with a transmission shaft, which can transmit the application to the wrist to rotate, stretch the wrist, and open and close the fingers.
The structure of the robotic arm mimics human fingers and is divided into three types: jointed, fixed jointed, and free jointed. The number of fingers can be divided into two fingers, three fingers, four fingers, etc., among which two fingers are more commonly used. Multiple shapes and sizes of clamps can be equipped according to the shape and size of the clamped object to meet the needs of operation. The so-called hand without fingers generally refers to vacuum suction cups or magnetic suction cups.
2. Arm
The function of the arm is to guide the fingers to accurately grasp the workpiece and transport it to the desired position. In order for the robotic arm to work correctly, all three degrees of freedom of the arm must be accurately positioned.
3. The torso is a bracket for installing arms, power sources, and various actuators.
Drive mechanism for welding robotic arm:
There are four main types of driving mechanisms used in robotic arms: hydraulic drive, pneumatic drive, electrical drive, and mechanical drive. Among them, hydraulic drive and pneumatic drive are more commonly used.
1. Hydraulic driven type
A hydraulic driven robotic arm typically consists of a hydraulic motor (various oil cylinders, oil motors), servo valves, oil pumps, oil tanks, and other driving systems, which are operated by the actuator of the driving robotic arm. Usually, it has a great lifting capacity (up to several hundred kilograms or more), characterized by compact structure, smooth movement, impact resistance, vibration resistance, and good explosion-proof performance. However, hydraulic components require high manufacturing accuracy and sealing performance, otherwise oil leakage will pollute the environment.
2. Pneumatic driven type
Its driving system usually consists of a cylinder, an air valve, an air tank, and an air compressor. Its characteristics are convenient air source, fast action, simple structure, low cost, and easy maintenance. But it is difficult to control the speed and the air pressure should not be too high, so the grabbing ability is low.
3. Electric drive is a commonly used driving method for robotic arms. Its characteristics are convenient power supply, fast response, high driving force (joint type load-bearing capacity has reached 400kg), easy signal detection, transmission, and processing, and can adopt multiple flexible control schemes. The driving motor generally adopts stepper motor, and DC servo motor (AC) is the main driving method. Due to the high speed of the motor, reduction mechanisms such as harmonic drive, RV cycloidal pinwheel drive, gear drive, spiral drive, and multi rod mechanism are usually required. Some robotic arms have started to use high torque, low-speed motors without reduction mechanisms for direct drive (DD), which can simplify the mechanism and improve control accuracy.
4. Mechanical driven type
Mechanical drive is only used in situations where the action is fixed. Generally, cam linkage mechanisms are used to achieve the specified actions. Its characteristics are reliable movements, high working speed, low cost, but not easy to adjust. Others also adopt hybrid driving, namely liquid gas or electric liquid hybrid driving.
Control system for welding robotic arm:
The elements of robotic arm control include work sequence, arrival position, action time, motion speed, acceleration and deceleration, etc. The control of robotic arms is divided into two types: point control and continuous trajectory control.
The control system can be designed to use numerical sequence control according to the requirements of the action. It first needs to be programmed and stored, and then according to the prescribed program, the storage methods for controlling the working program of the robotic arm include separate storage and centralized storage. Separate storage is the process of storing information on various control factors separately in two or more storage devices, such as sequential information stored in pin plates, cam drums, and perforated belts; The location information is stored in time relays, fixed speed rotary drums, etc; Centralized storage is the process of storing all control factor information in a single storage device, such as magnetic tape, magnetic drum, etc. This method is used in situations where sequence, position, time, speed, etc. need to be controlled simultaneously, that is, in the case of continuous control.
The pin board is used in situations where rapid program changes are required. Changing the program only requires extracting a different type of pin board, while the same plugin can be reused repeatedly; The length of the program that can be accommodated by the perforated tape is not limited, but if an error occurs, it must be completely replaced; The information capacity of perforated cards is limited, but they are easy to replace, store, and can be reused; Magnetic cores and drums are only suitable for situations with large storage capacities. As for which control component to choose, it is determined based on the complex and accurate program of the action. For robotic arms with complex movements, a learning and reproducing control system is adopted. More complex robotic arms use digital control systems, small computers, or microprocessor controlled systems. The most commonly used control system is the pin plate, followed by the cam drum. It is equipped with many cams, each assigned to a motion shaft, and the drum completes one cycle after one revolution.
Advantages of welding robotic arms:
Robotic arms can save workers, improve efficiency, reduce costs, enhance product quality, improve safety, and enhance factory image.
The advantages of multi joint robotic arms are: flexible movements, low motion inertia, strong versatility, the ability to grasp workpieces close to the machine base, and the ability to work around obstacles between the machine body and the working machinery. With the needs of production, higher requirements are being put forward for the flexibility, positioning accuracy, and working space of multi joint arms. Multi joint arms have also broken through traditional concepts, with the number of joints ranging from three to over ten or even more. Their appearance is not limited to human like arms, but varies according to different situations. The excellent performance of multi joint arms cannot be compared to single joint robotic arms.
The application prospects of welding robotic arms:
With the development of network technology, the networking operation of robotic arms is also a direction for future development. Industrial robots are a high-tech automated production equipment developed in recent decades. Industrial robotic arms are an important branch of industrial robots. Its characteristic is that it can be programmed to complete various expected job tasks, combining the advantages of both humans and machines in terms of construction and performance, especially reflecting human intelligence and adaptability. The accuracy of robotic arm operations and the ability to complete tasks in various environments have broad development prospects in various fields of the national economy.
Key words:



Online Consultation
Promote welding and cutting automation related technologies.
✓ Reply Within 24 Hours
✓ Site Commissioning
✓ Customer Service Staff Provide Attentive Service
✓ OFFICIAL Website: www.xbznjx.com
Copyright © 2024 Xinbao Robot Technology (Nantong) Co., Ltd. All Rights Reserved | 苏ICP备19061139号

